コンパニオンロボットを 物理サービスエージェントへ 変える特許技術
このポートフォリオは、第三者サービスのリクエストとロボット側センシングを、ユーザーの周囲で実行される物理的アクションへ変換する、コンパニオンロボットのテクノロジーに焦点を当てています。
22
件の登録特許
 米国 7
·
米国 7
·
 中国 6
·
中国 6
·
 日本 9
日本 9
2041 年まで権利存続、Panasonic Holdings Corporation 出願
このポートフォリオは、第三者サービスのリクエストとロボット側センシングを、ユーザーの周囲で実行される物理的アクションへ変換する、コンパニオンロボットのテクノロジーに焦点を当てています。
米国 7
·
中国 6
·
日本 9
導入済みのコンパニオンロボットを、収益化可能なサービスエンドポイントへ変えます。特許取得済みのRaaSテクノロジーと制御フローにより、ロボットをヘルスケア、安全、保険、ケアサービスのパートナーと接続し、ハードウェア販売やプリインストール済みスキルを超えた収益機会を広げます。
デジタルサービスをユーザーの物理空間へ拡張します。コンパニオンロボットが運動を促し、屋外で付き添い、より安全な移動を誘導し、個々のユーザーの周囲で安全関連の物理的サポートを提供するプレミアムサービス階層を追加できます。
サービス事業者と物理ロボットの間に戦略的な媒介レイヤーを構築できます。サービスリクエストを自律的なロボットの物理アクションへ変換する主要なRaaSトランザクションをカバーし、プラットフォーム事業者がコンパニオンロボット上で複数サービスをオーケストレーションできるようにします。
登録特許によりカバーされた5つのRaaS UXシーン。サービスプロバイダーからの要求、ロボティクスオペレーターによるオーケストレーション、およびロボット動作に及びます。
UX価値
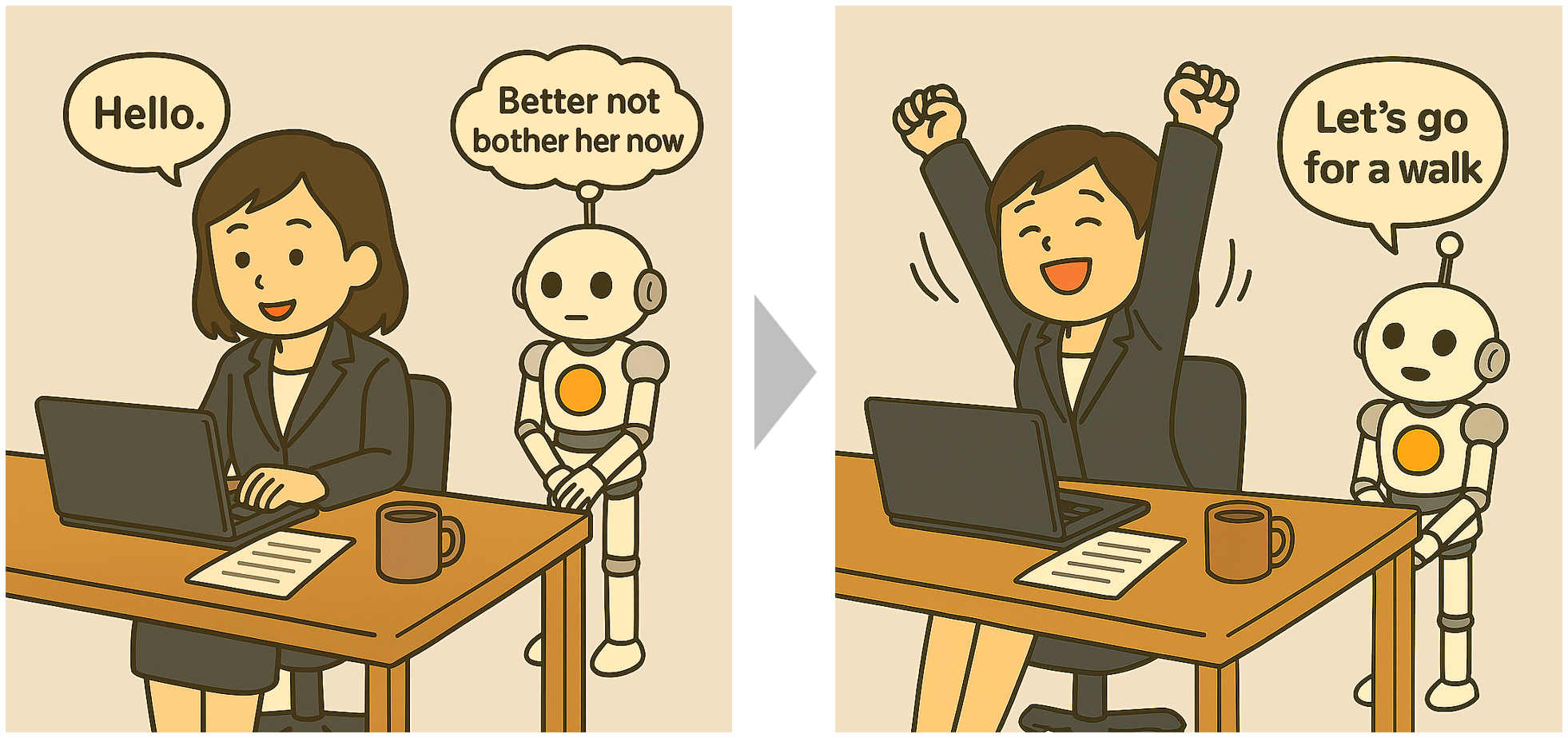
健康サービスはロボットに運動を促すよう依頼できますが、声をかけるのに良いタイミングばかりとは限りません。ロボットはユーザーが応じられる状態になるまでリクエストを保留します。同じ働きかけでも、タイミングひとつで結果は根本的に変わります。
サービスプロバイダーのサーバが生体活動データを評価して運動リクエストを発行します。ロボティクスオペレーターのサーバはこのリクエストを一時的に保留し、ロボットのセンサーから動的な状態データを取得し、ユーザーの状態が適切であると判断した後にのみ、実行指示をロボットへ送信します。
登録特許
115427126
|
7113270
UX価値
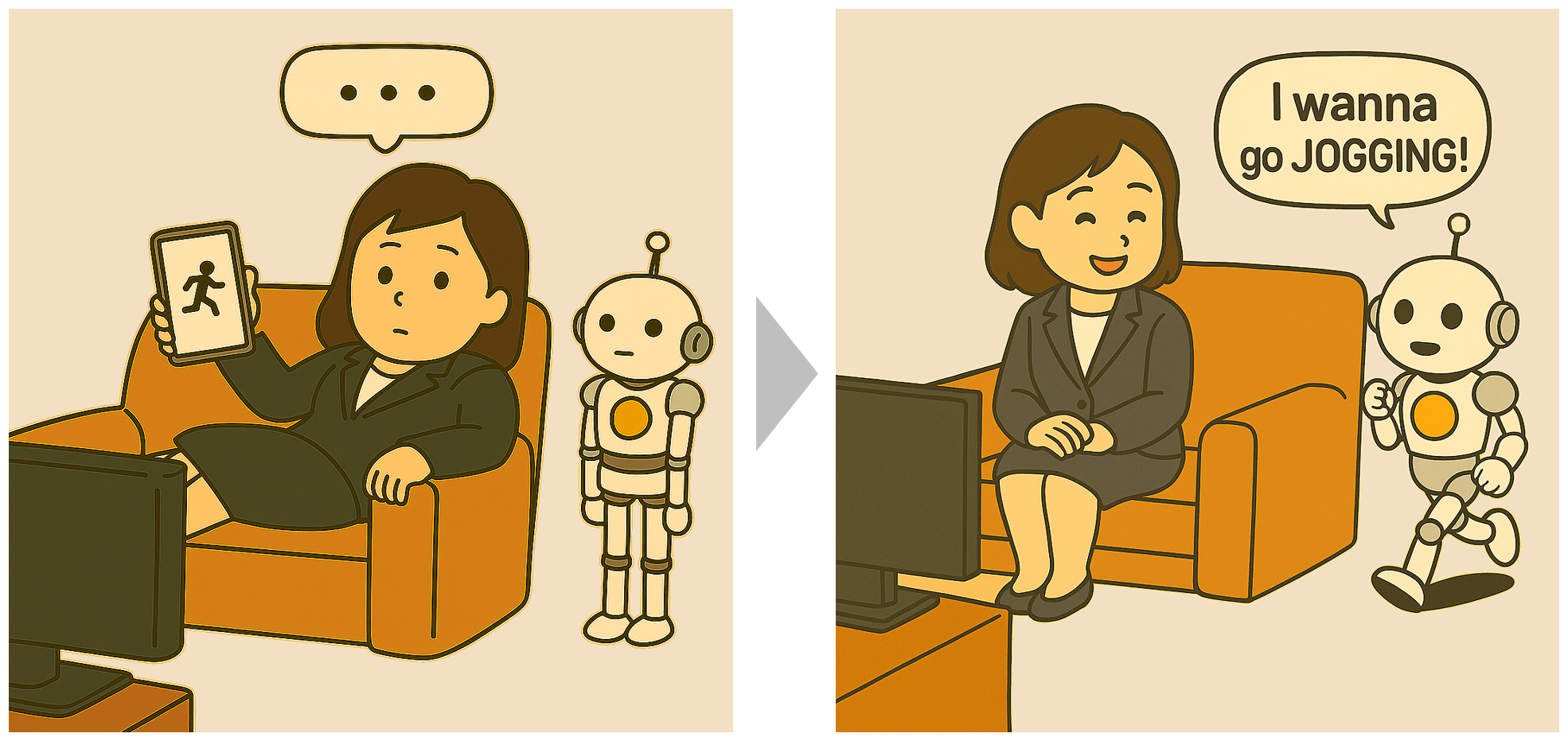
健康サービスはデジタルの運動促進メッセージを送ることができますが、多くは無視されてしまいます。活動量が依然として不足している場合、ロボットはユーザーのもとに移動し、身体的なジェスチャーで運動を直接誘いかけます。ユーザーが慣れ親しんだコンパニオンロボットからの誘いは、スワイプひとつで消せるデジタルナッジとは、根本的に異なります。
デジタルメッセージの送信後もユーザーの運動量が目標を下回ったままの場合、サービスプロバイダーのサーバはロボティクスオペレーターのサーバへリクエストを送信します。これを受けて、ロボティクスオペレーターのサーバはロボットに介入を指示します。ロボットはユーザーのもとへ移動し、身体的なジェスチャーを実行します。その際、自身のセンサーでユーザー行動をモニタリングして運動を支援します。
登録特許
11942216, 12119111
|
116234664
|
7178579, 7357260, 7499479
UX価値
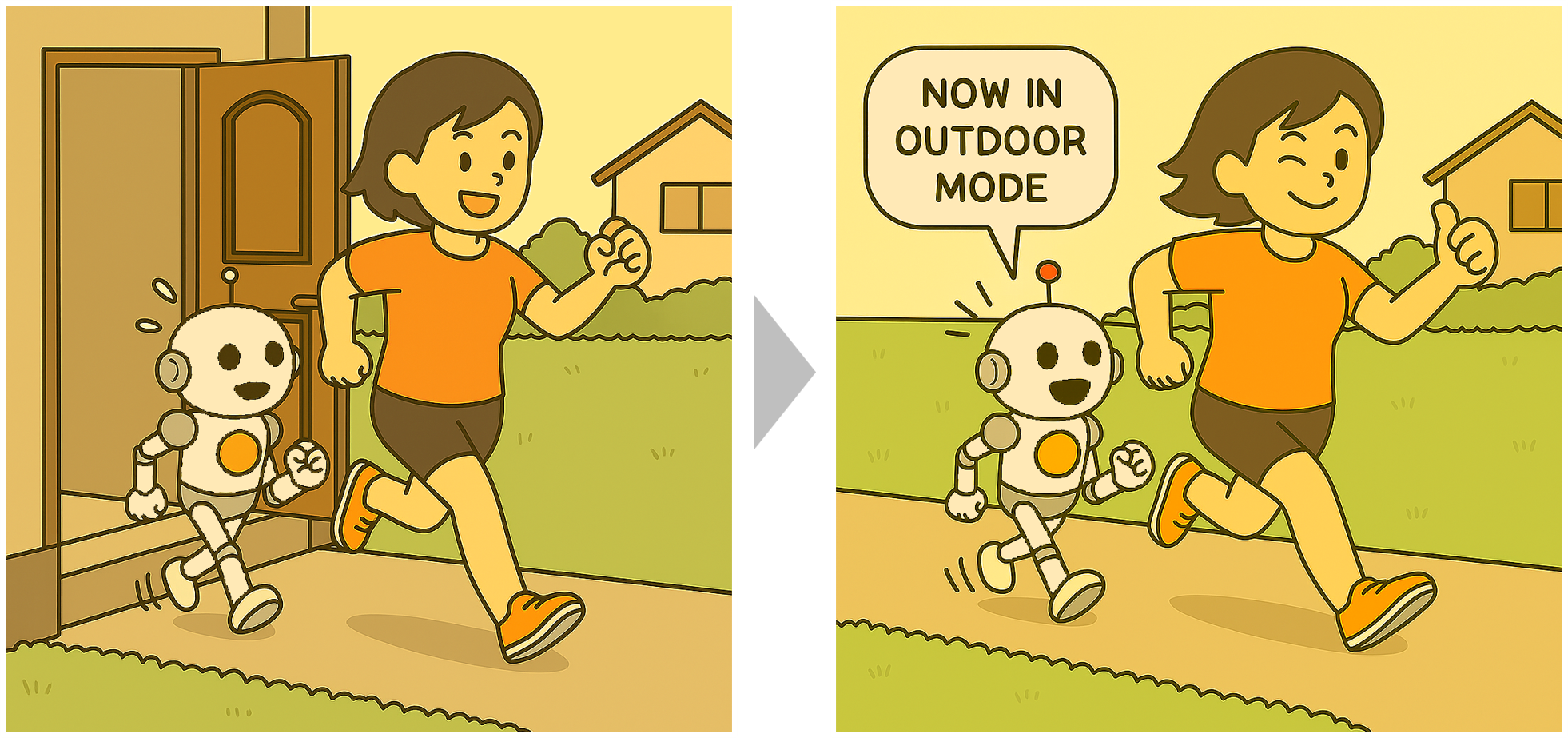
安全サービスでは、宅内・宅外を問わずユーザーを24時間サポートすることが求められる場合があります。ユーザーと共に宅外にいる場合、ロボットは宅外モードへ切り替わり、ユーザーのそばに留まりながら周囲の状況を把握し、安全の維持を支援します。こうして、状況に応じた安全サポートが実現します。
サービスプロバイダーのサーバは、ロボットが宅外でユーザーに付き添い、ユーザーをモニタリングするための要求を送信します。その後、ユーザーがロボットと共に宅外へ移動した場合、ロボットの動作モードは宅内仕様から宅外仕様へ切り替わります。このモード切替は、移動を検知したロボティクスオペレーターのサーバがコマンドを送信すること、またはロボット自身が内蔵センサーおよび事前に取得した要求に基づいて自律的に行うこと、という2つの方法のいずれかによりトリガーされます。
登録特許
12169408
|
115428470
|
7153891
UX価値
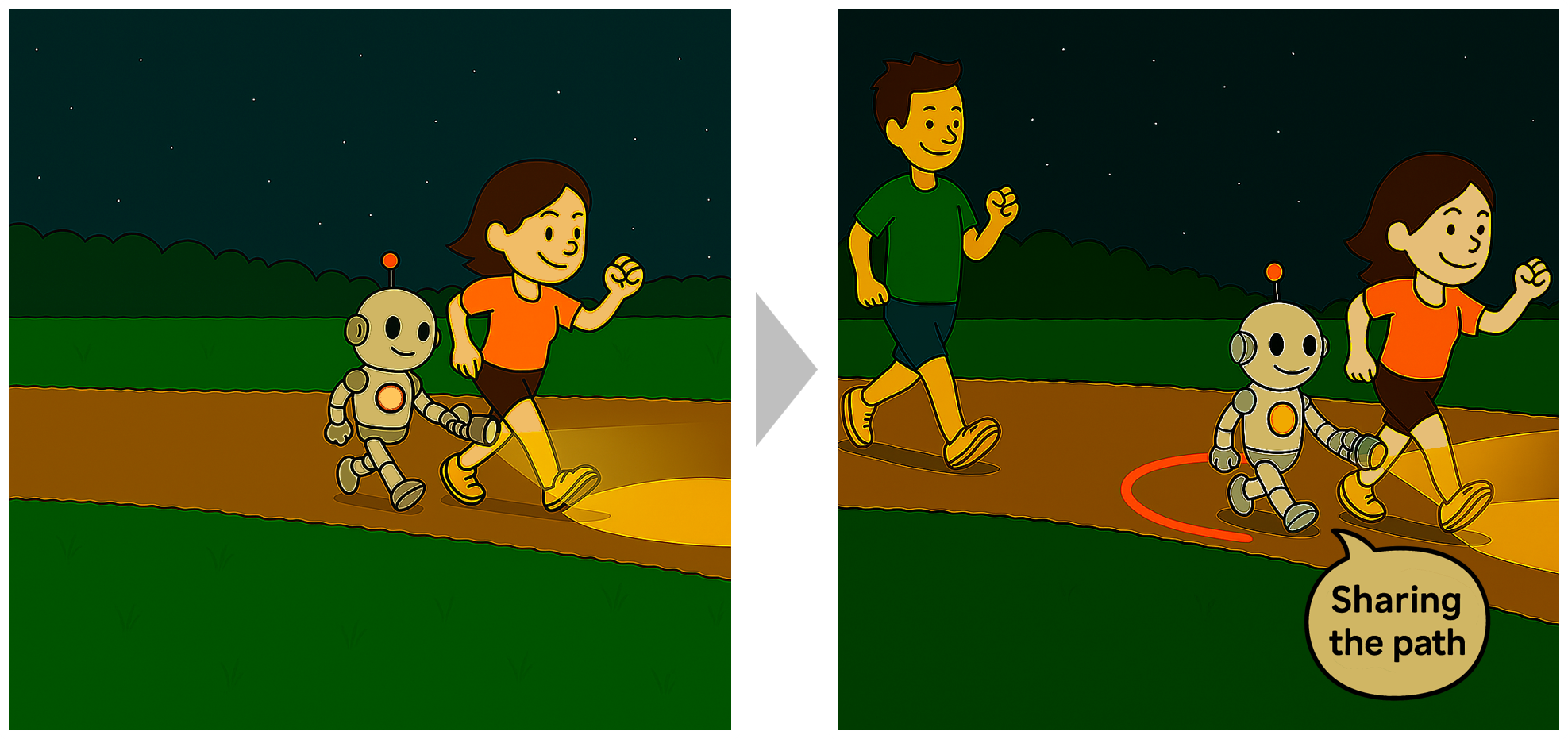
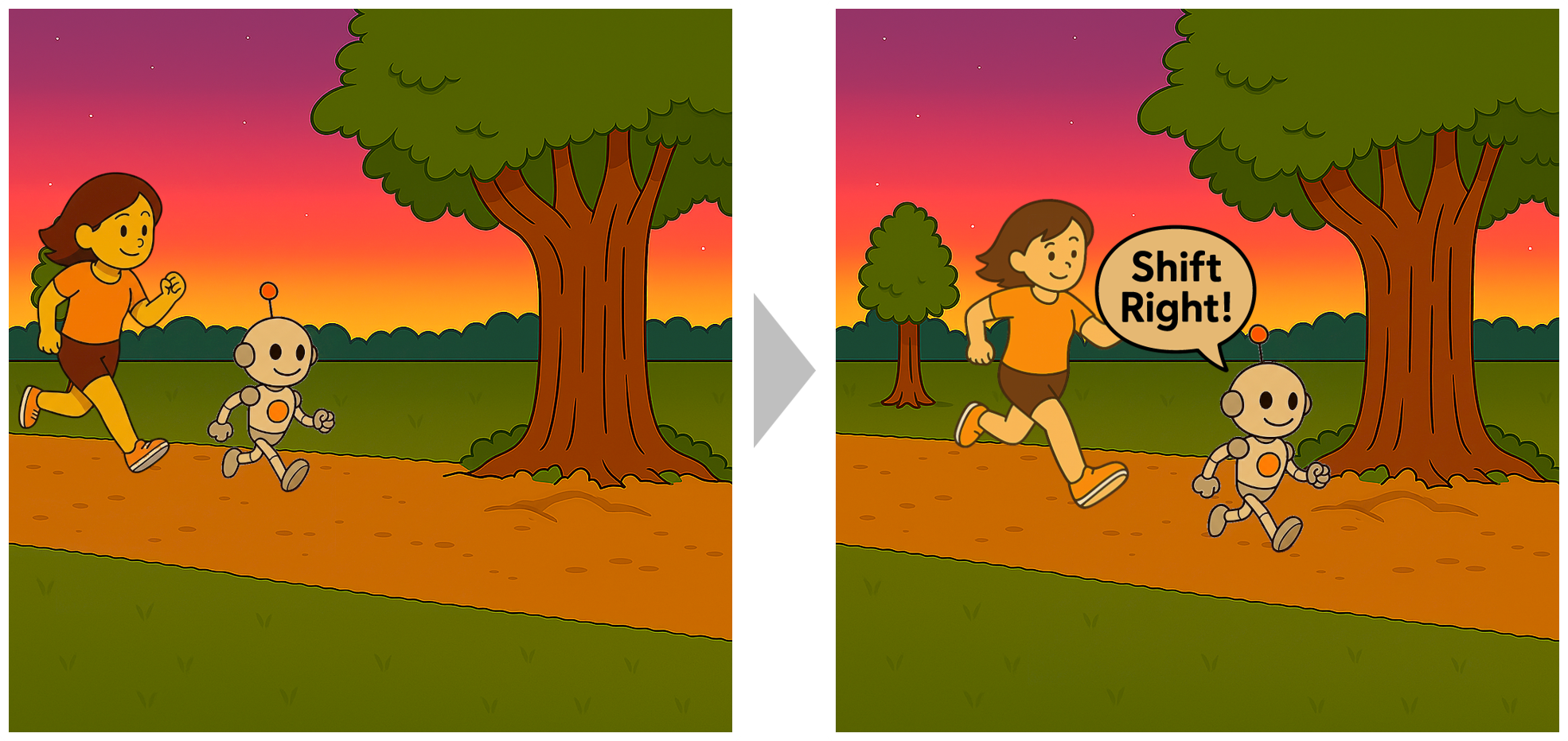
デジタルな安全サービスはユーザーの不安を和らげますが、周囲の危険に物理的に対処することはできません。ロボットがユーザーの前方へ先回りして危険から遠ざけるよう誘導し、または脅威との間に物理的に入り込んでシールドとして機能します。デジタルな警告ではなく、現実世界での物理的な介入こそが、安心感を生み出します。
ロボットは内蔵センサーによりユーザーの位置および周辺の物体を監視します。経路上の危険物または移動する脅威を検知すると、ロボットは自律的に「先導位置」へ移動し、ユーザーを危険から遠ざけるよう誘導します、またはユーザーと移動する脅威の間に「ガード」として位置を取り直します。
登録特許
11960285, 12253863
|
116249604
|
7249565, 7281654
UX価値
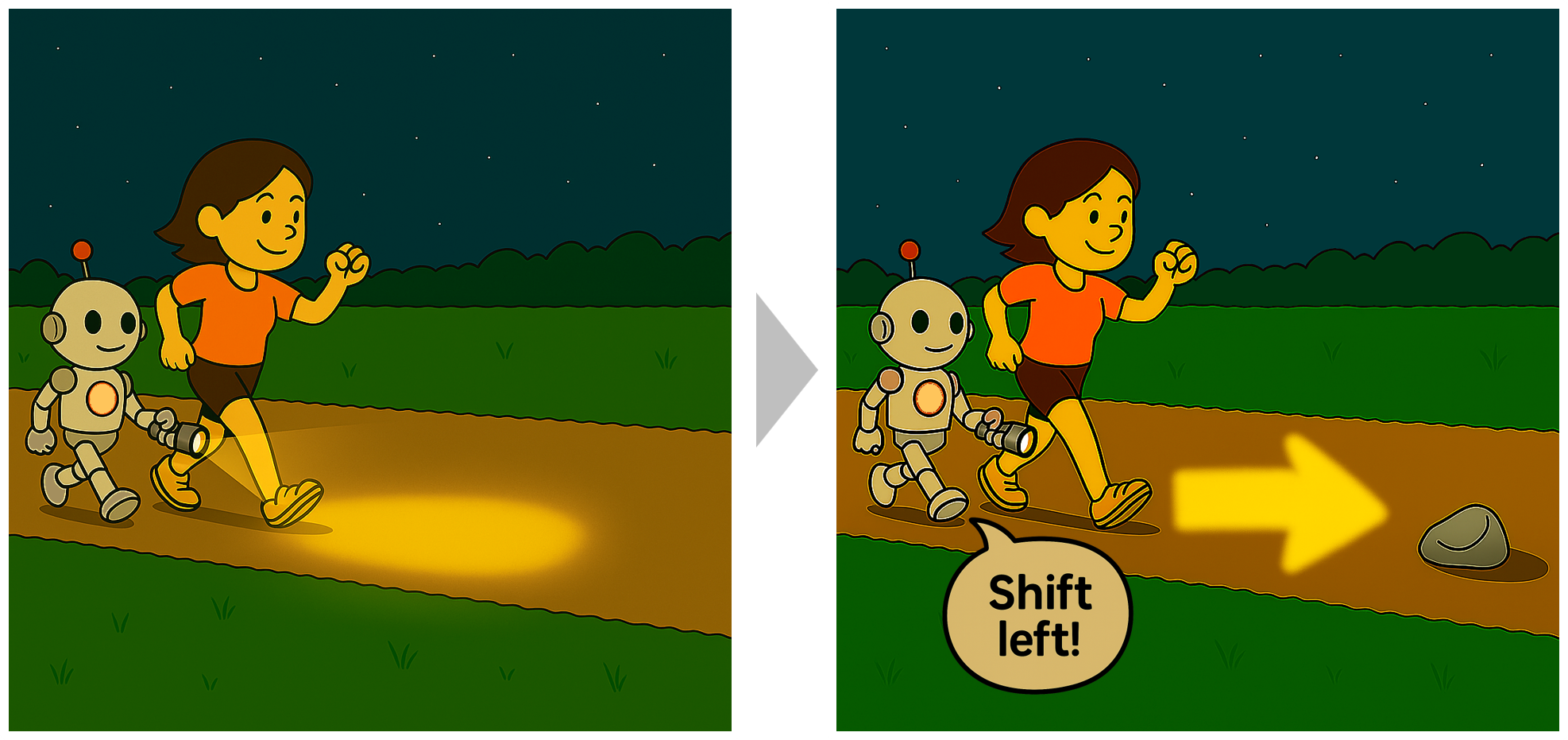
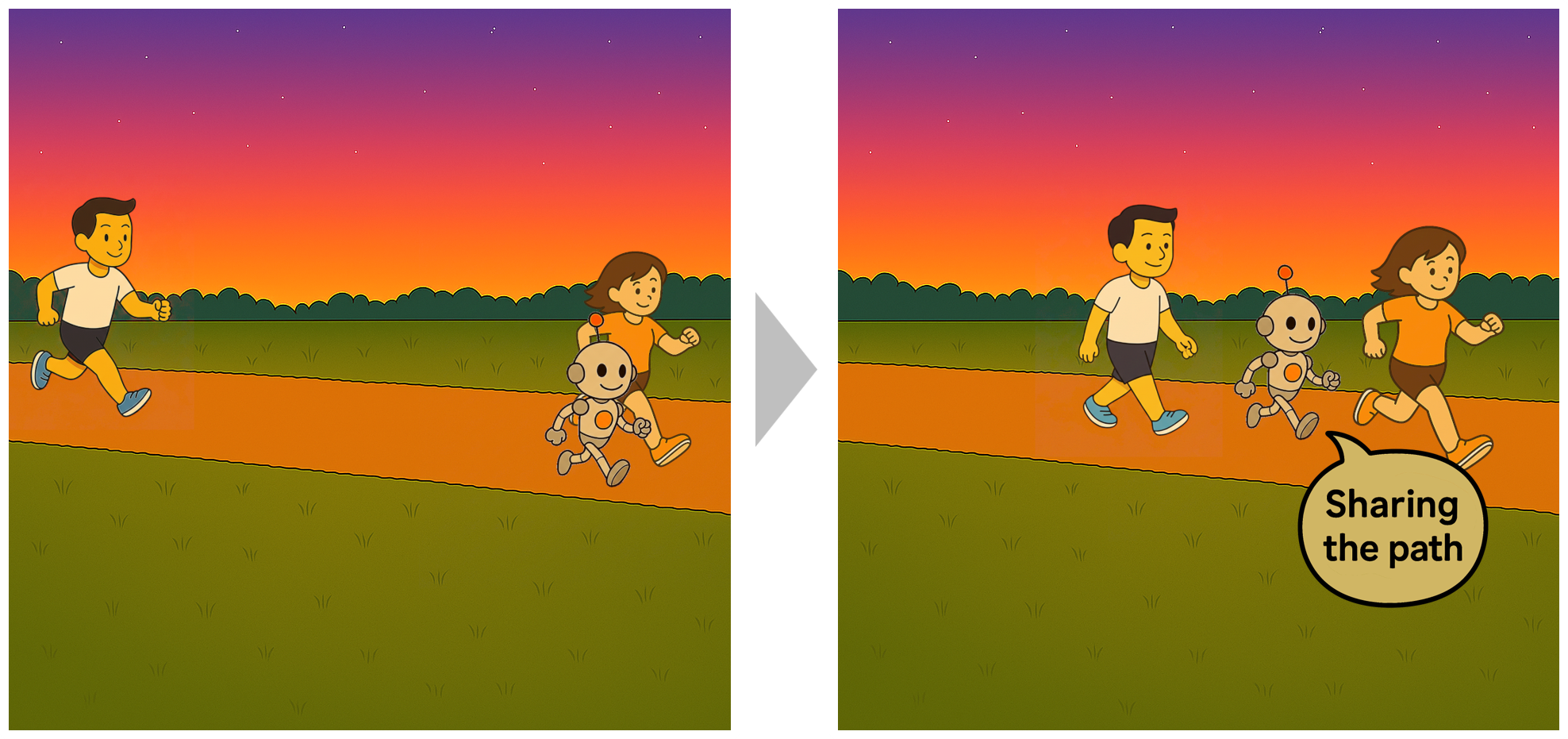
従来の警告音や画面通知は、ユーザー自身が情報を処理し、どう避けるかを判断する必要があります。その代わり、ロボットは静かに進路照明の向きを変えてユーザーの足取りを障害物から遠ざけ、または地面に警告光を投影して接近する危険を知らせます。足元への直接的な視覚アプローチは、無意識で自然な回避行動を引き出します。
ロボットは、内蔵センサーによりユーザーの位置および周辺の物体をモニタリングします。経路上の危険物または移動する脅威を検知した場合、ロボットは、ユーザーの移動の変化を誘導するために、光を別方向の新たな領域へ自律的に向け直すか、またはユーザーと接近してくる移動する脅威との間の領域に光を投影します。
登録特許
11906966, 11886190
|
115427910, 115877778
|
7117650, 7117563